Navigation through COVID-19 Hotspots IEEE IoT Journal (accepted)
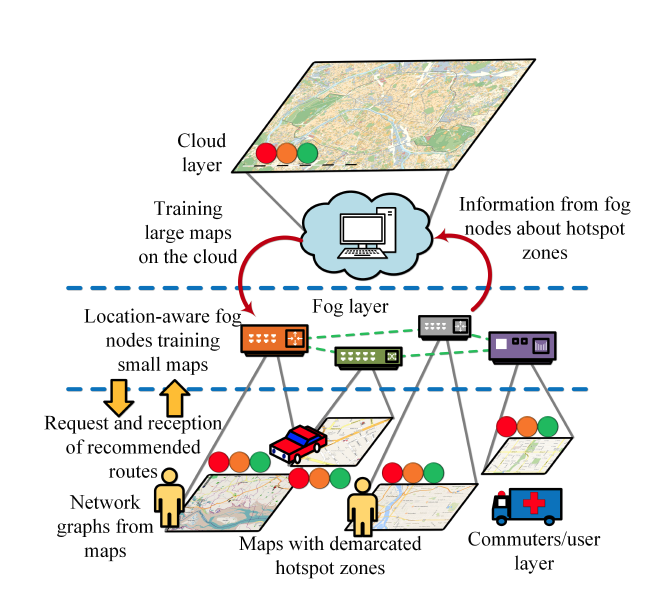
In this paper, we present a Q-learning-enabled safe navigation system – S-Nav – that recommends routes in a road network by minimizing traveling through categorically demarcated COVID-19 hotspots. S-Nav takes the source and destination as inputs from the commuters and recommends a safe path for traveling. The S-Nav system dodges hotspots and ensures minimal passage through them in unavoidable situations. This feature of S-Nav reduces the commuter’s risk of getting exposed to these contaminated zones and contracting the virus. To achieve this, we formulate the reward function for the reinforcement learning model by imposing zone-based penalties and demonstrate that S-Nav achieves convergence under all conditions. To ensure real-time results, we propose an Internet of Things (IoT)-based architecture by incorporating the cloud and fog computing paradigms. While the cloud is responsible for training on large road networks, the geographically-aware fog nodes take the results from the cloud and retrain them based on smaller road networks. Through extensive implementation and experiments, we observe that S-Nav recommends reliable paths in near real-time. In contrast to state-of-the-art techniques, S-Nav limits passage through red/orange zones to almost 2% and close to 100% through green zones. However, we observe 18% additional travel distances compared to precarious shortest paths.
Read More PDFVision-based Tracing of Contact Surfaces in Hospitals CRC Press (accepted)

In this chapter, we propose COVI-SCANNER, an IoT-based solution to overcome the issue of secondary spread of the virus from fomite spaces in public infrastructures. With the assumption that the infected individuals are already identified, we design COVI-SCANNER as two augmented reality-based phases: contamination and sanitization. In the contamination phase, we first detect the person and the corresponding bounding boxes for tracking his/her movements and highlight the spaces as they contaminate it. In the sanitization phase, we first identify cleaning/sanitization materials/objects and remove the markers as they pass (while cleaning) through the highlighted fomite spaces to ensure sanitization. Additionally, we minimize the delay by dividing the resource-constrained fog nodes into two dedicated sets for performing each phase before transferring to centralized servers for storage, which also reduces bottlenecks at the server. Through the extensive implementation of COVI-SCANNER, we observe that it operates with 81% accuracy on real-time data with a delay of at most 0.1 and 1.2 seconds for the contamination and sanitization phases, respectively. Further, due to the incorporation of the IoT- based architecture, we observe maximum upload and download rates of 700 Kbps in each phase.